Starting with YAW I suspended the RCTP from an elastic ribbon so that it was able to yaw freely.
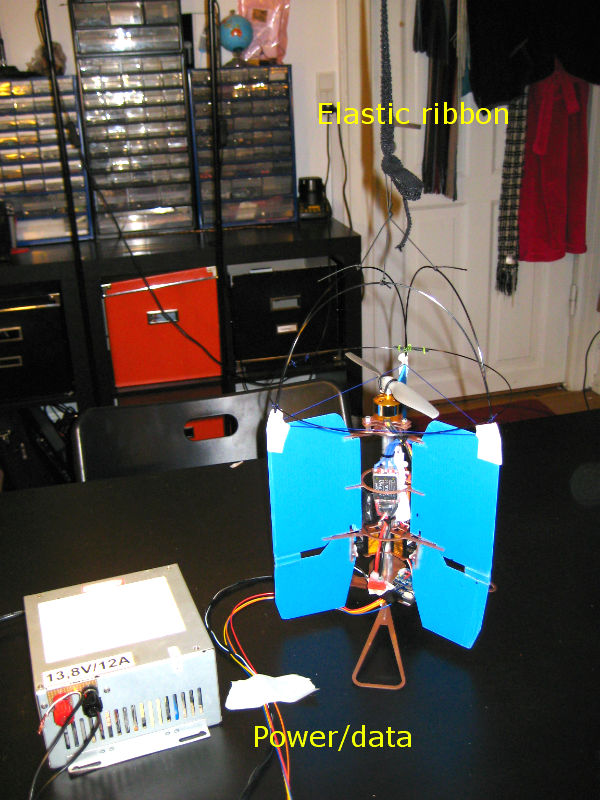

When starting the rotor the system was oscillating around the YAW axis as suspected. Increasing the D-term (again via. a slider on the RC controller) cancelled the oscillation. A push on the RCTP confirmed that the regulation loop worked.

After some testing it was confirmed that the YAW angle of the RCTP was not zero (zero angle is currently the compass angle in which the flight contrroller is power up). Increasing the I-term fixed that problem.
Yaw is now stable regardless of the rotor speed.
No comments:
Post a Comment